ZYNQ
Xilinx Commercial, 7 Series, Zynq, Value Index = 020, cl: Wire-bond Molded, Package Pin Count = 400(0.8mm), Speed Grade-2
简介
ZYNQ 系列包含了完整的 ARM 处理子系统(PS),每颗 ZYNQ 系列处理器都包含 Cortex-A9 处理器。
- PS:ARM 的 SoC 部分,AMBA 互联,内部存储器,外部存储器接口和外设
- PL:FPGA 部分
PS 与 PL 互联
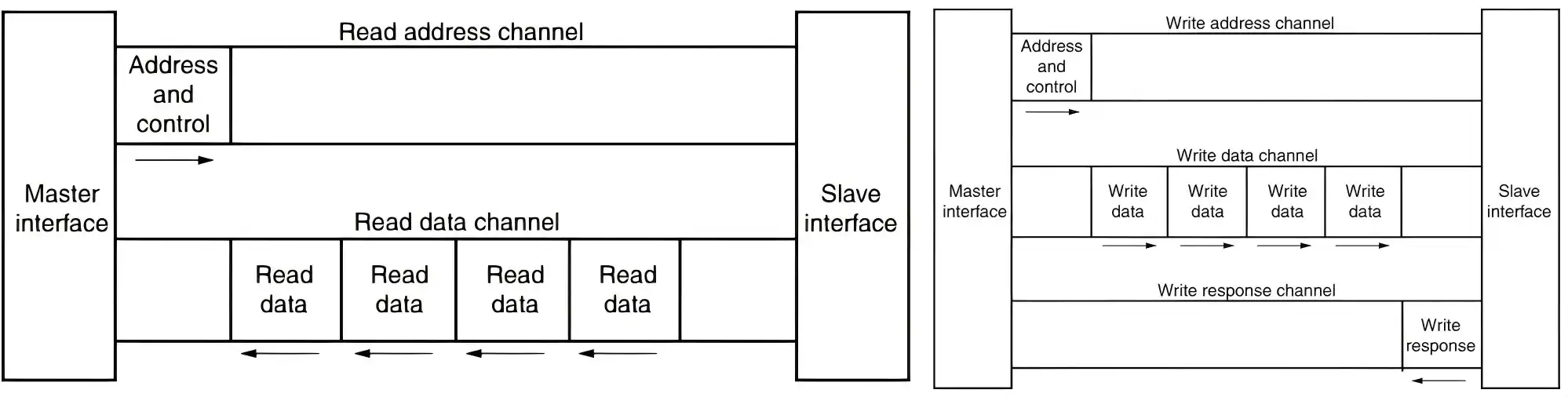
AXI(Advanced Extensible Interface)协议,主要描述了主从设备之间的数据传输,ZYNQ 中的版本是 AXI4.0
AXI 是 ARM 公司提出的 AMBA(Advanced Microcontrooler Bus Architecture)的一部分,是一种高带宽低延迟的片内总线。
在 ZYNQ 中,支持 AXI-Lite,AXI4 和 AXI-Stream 三种总线,
| 接口协议 | 特性 | 应用 |
|---|---|---|
| AXI-Lite | 地址/单数据(32bit)传输 | 低速外设/控制 |
| AXI4 | 地址/突发数据传输 | 地址批量传输 |
| AXI-Stream | 数据突发传输 | 数据流和媒体流传输 |
- AXI-Lite:轻量级,适合小批量数据传输、简单控制场合。读写时一次 32bit,不支持批量传输。用于访问低速外设和控制外设;
- AXI4:支持批量传输(具有数据读写的 burst 功能,对一片地址进行一次性读写);
上述两种采用内存映射控制方式,ARM 将用户自定义 IP 编入某一地址进行访问,读写时就像在读写自己片内的 RAM。代价时资源占用过多,需要额外的读写地址线、控制线,写应答线等。
- AXI-Stream:连续流接口(像 FIFO 一样一直读一直写),不需要地址线,因此不能通过内存地址映射的方式控制,需要有个转换装置;AXI-Stream 适合用于实时信号处理;
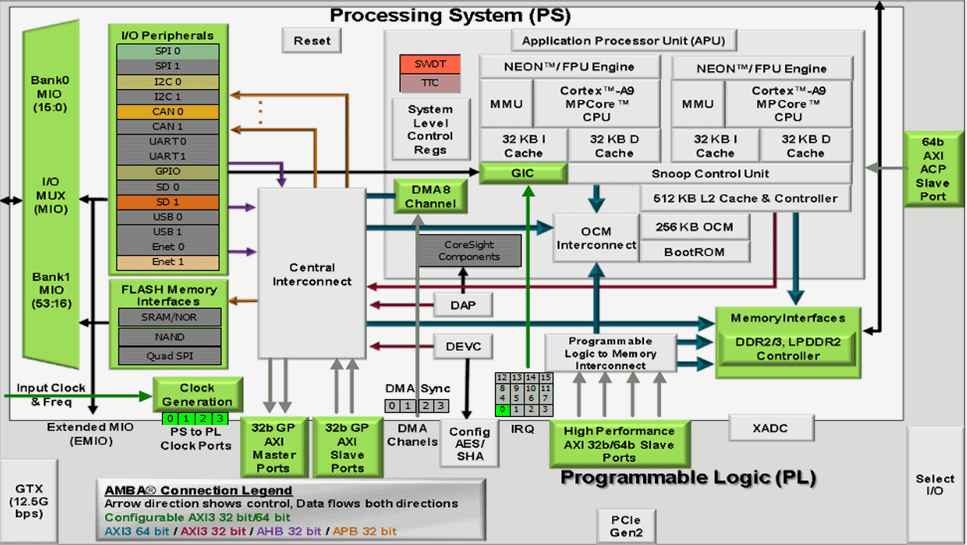
ZYNQ 中 硬件实现 了 AXI 总线协议,包括 9 个物理接口。其中有 2 个 AXI-GP 是主机接口(Master),可以主动访问 PL 逻辑,把 PL 映射到某个地址,读 PL 寄存器就像在读自己的存储器;其余 7 个为从机接口(Slave),被动接受来自 PL 的读写。
- AXI-GP:两个 32 位主设备接口和两个 32 位从设备接口;
- AXI-HP:高性能高带宽的 AXI3.0 接口,用于 PL 访问 PS 的存储器(DDR 和 On-chip RAM),总共由四个;
- AXI-ACP:用于管理 DMA 之类不带缓存的 AXI 外设,PS 端时 Slave 接口;
其中 GP 是 32 位的低性能接口,理论带宽约为 600MB/s,HP 和 ACP 接口为 64 位高性能接口,理论带宽为 1200MB/s。
位于 PS 的 ARM 由直接硬件支持的 AXI 接口,PL 需要使用逻辑实现相应的 AXI 协议
- AXI-DMA:从 PS 内存到 PL 高速传输通道的转换,AXI-HP↔AXI-Stream;
- AXI-FIFO-MM25:从 PS 内存到 PL 通用传输通道的转换,AXI-GP↔AXI-Stream;
- AXI-Datamover:从 PS 内存到 PL 高速传输高速通道的转换,AXI-HP↔AXI-Stream,完全由 PL 控制;
- AXI-CDMA:PL 将数据从一个位置搬移到另一个位置;
中断
ZYNQ 中断分为三部分,
- SGI,软件生成的中断,16 个端口;
- PPI,CPU 私有外设中断,5 个;
- SPI,共享外设中断,来自 44 个 PS 端 IO 外设以及 16 个 PL 端中断
中断控制器(GIC, Generic Interrupt Controller)用于对中断进行使能、关闭、掩码、设置优先级等。
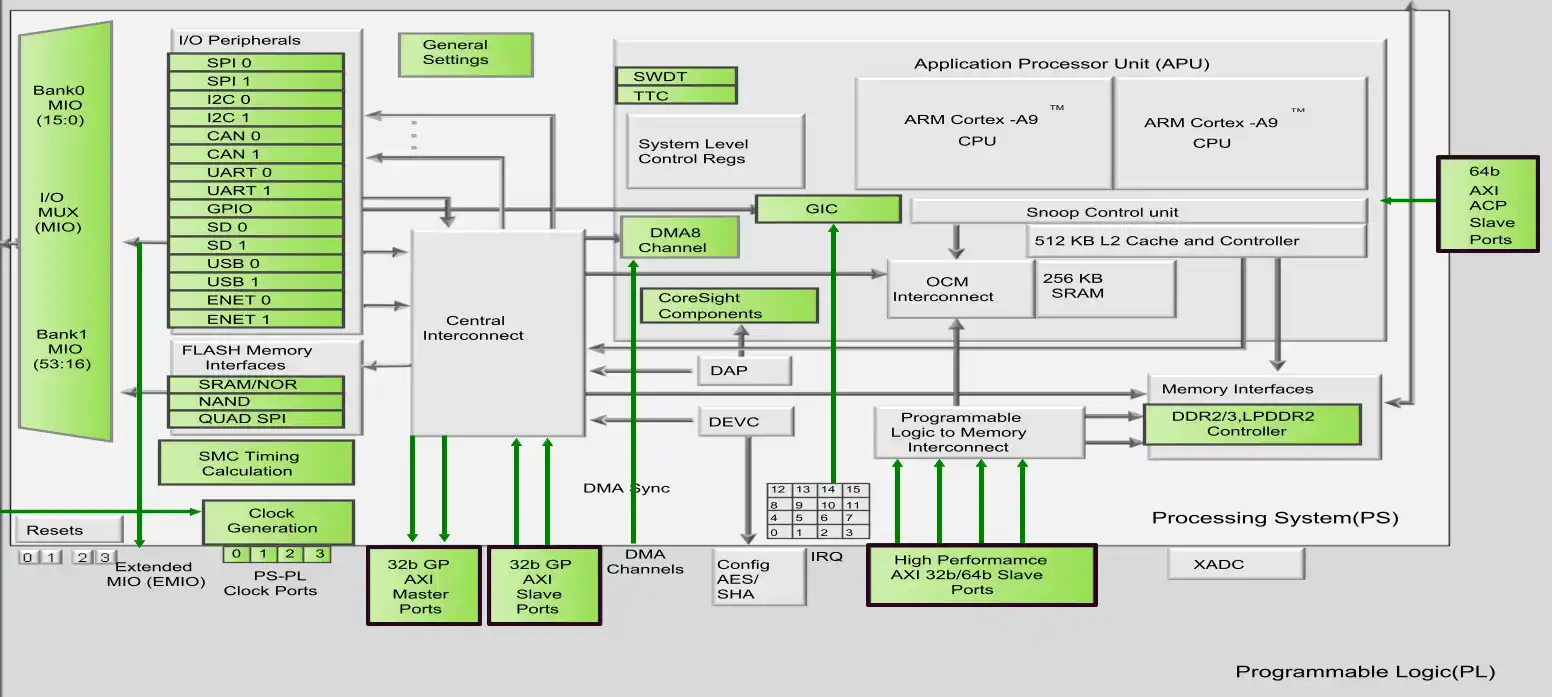
Block Design
ZYNQ Block Design
ZYNQ 硬核架构图,绿色部分是可配置模块。
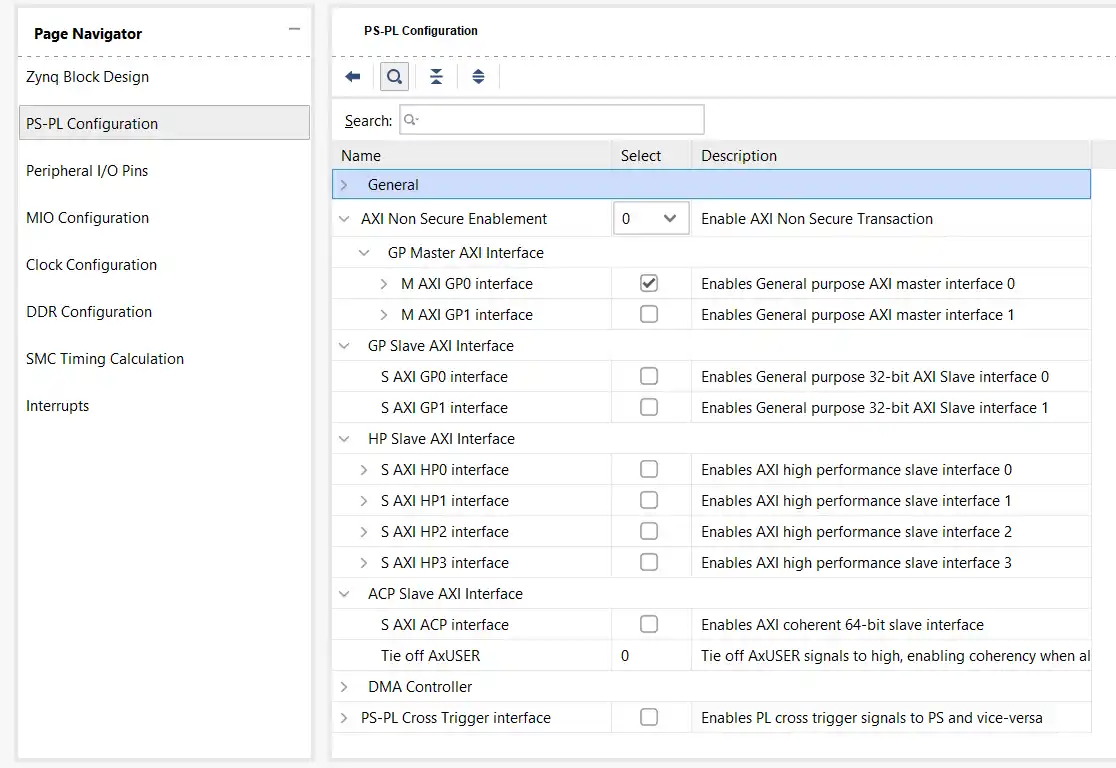
PS-PL Configuration
PS 与 PL 之间接口的配置主要聚焦于 AXI 接口,这些接口能够扩展 PL 端的 AXI 接口外设。因此,当 PL 需要与 PS 进行数据交互时,必须遵循 AXI 总线协议。Xilinx 为我们提供了丰富的 AXI 接口 IP 核。
Peripheral I/O Pins
图形化配置界面(ZYNQ 的 PS 端外设是复用的,相同的引脚标号可以配置成不一样的功能,但只能同时配制成一种外设)
- PS 端分为两个
Bank,分别为原理图中的Bank500,501,分别配置为LVCMOS3.3V和LVCMOS1.8V; - 根据原理图,串口连接在 PS 的
MIO48,49上,因此在选项中使能 UART1(MIO48 MIO49); Quad SPI Flash, QSPI:作为 ZYNQ 的启动存储设备,ZYNQ 通过读取 QSPI 中存储的启动文件加载 ARM 和 FPGA,选择Single SS 4bit IOEthernet:以太网接口,根据原理图,配置MDIO为MIO52,53
(同理,可根据原理图第 4 页配置)
[Run Block Automation] 后将 M_AXI_GP0_ACLK 与 FCLK_CLK0 相连。
GPIO
UG585-ZYNQ_7000_SoC
Xilinx ZYNQ 提供了 MIO、EMIO、AXI_GPIO 三种类型的 GPIO 接口。
- MIO 是属于 PS 端的固定 IO 口,使用时不需要消耗 PL 端的资源;
- EMIO 是通过 PL 进行扩展的 IO 口,使用时需要分配 PL 端的引脚,消耗 PL 端资源;
- AXI_GPIO 是 Xilinx 封装好的 IP 核,是 PS 端通过 AXI GP 总线控制 PL 端的 IO 口技术,使用时需要消耗 PL 端资源。
MIO
UG585-ZYNQ_7000_SoC:Figure 14-1 GPIO Block Diagram(P410)
ZYNQ7000 系列芯片有 54 个 MIO,它们分配在 GPIO 的 Bank0 和 Bank1,隶属于 PS 部分,这些 IO 与 PS 直接相连使用时不需要添加引脚约束,对 PL 部分不可见。所以对 MIO 的操作可以看作是纯 PS 的操作。用 SDK 软件操作底层都是对于内存地址空间的操作。
MIO 或 EMIO 使用时需要调用 API 函数:
- 根据设备 ID 返回结构体 XGpioPs_Config 的配置
- 初始化 GPIO,主要完成对 XGpioPs 结构体的配置
- 为指定的引脚配置输入输出方向(对方向寄存器
DirModeReg使能)。0输入,1输出
- 设置指定引脚输出使能(对
OpEnableReg寄存器配置)。OpEnableReg 与 DirModeReg 属于逻辑与的关系,只有两个都配置成功才能实现 MIO 的输入或者输出的配置。
- 从指定引脚读出数据。返回值是从 DATA_RO 寄存器内取出读到的数据
- 对指定引脚写入数据。对 DATA 寄存器、DATA_MSW 寄存器、DATA_LSW 寄存器进行配置,共同完成输出数据的写入。
例如,利用 MIO 使 PS 端 LED 灯闪烁:
#include "xparameters.h" // 宏定义查找
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xgpiops.h"
#include "sleep.h"
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID // "xparameters.h"
XGpioPs Gpio;
int main() {
init_platform();
int Status;
XGpioPs_Config *ConfigPtr;
// 初始化 GPIO
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID); // (1) 配置
Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr, ConfigPtr->BaseAddr); // (2)
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
// 设置方向为输出方向,并使能输出
XGpioPs_SetDirectionPin(&Gpio, 0, 1); // (3) 设置IO的输入输出方向
XGpioPs_SetOutputEnablePin(&Gpio, 0, 1); // (4) 使能对应的IO
XGpioPs_SetDirectionPin(&Gpio, 13, 1);
XGpioPs_SetOutputEnablePin(&Gpio, 13, 1);
while(1){
// 0 → 1 → 0 → ...
XGpioPs_WritePin(&Gpio, 0, 0x0); // (5) 对IO读写操作
XGpioPs_WritePin(&Gpio, 13, 0x0);
sleep(1);
XGpioPs_WritePin(&Gpio, 0, 0x1);
XGpioPs_WritePin(&Gpio, 13, 0x1);
sleep(1);
}
cleanup_platform();
return 0;
}
EMIO
[Customize Block] → [MIO Configuation] 选择 EMIO
扩展 MIO,依然属于 ZYNQ 的 PS 部分,只是连接到了 PL 上,再从 PL 的引脚连到芯片外面实现数据输入输出。 无论是 EMIO 还是 MIO 都属于 PS 上的 IO,直接由 PS 操作,PS 操作 MIO 和 EMIO 的方法类似。
MIO 分布在 BANK0,BANK1,而 EMIO 则分布在 BANK2、BANK3,参考 [Figure 14‐1: GPIO Block Diagram]
-
MIO 在 ZYNQ 上的管脚是固定的,而 EMIO 是通过 PL 部分扩展的,所以使用 EMIO 时候需要在约束文件中分配管脚,并且设计 EMIO 的程序时,需要生成 PL 部分的 bit 文件烧写到 FPGA 中;
-
MIO 共占 54bit,占用 IO 号为 0-53,配置方法见 Block Design/Peripheral I/O Pins 部分;EMIO 占 64bit,占用 IO 号为 54-117;
-
MIO和EMIO都是直接挂在PS上的GPIO,由 PS 操作。调用头文件
xgpiops.h即可;AXI_GPIO是通过AXI总线挂在PS上的GPIO上,使用 AXI_GPIO 时,需要调用头文件xgpio.h;
AXI GPIO
AXIGPIO 由 FPGA 的 PL 逻辑核功能实现,相当于 GPIO 的 IP 核,通过 AXI 总线挂在 PS 上的 GPIO 上,耗费 PL 端的逻辑资源。
IP Catalog
Clock Wizard
锁相环(PLL),用于产生 \(50Hz\) 的分频或倍频。
locked信号:观察输入时钟是否锁定,如果输入时钟信号锁定,就会输出一个 locked 高电平信号。
locked 信号是在输入信号稳定之后再输出一个 locked 信号,刚开始 locked 信号是低电平,等到时钟信号稳定之后他就会拉高。
Block Memory Generator
用于缓存数据。
-
Memory Type常用的是Simple Dual Port RAM,两个端口(读写+只读)输入和输出信号独立; -
Primitives Output Register:(在输出数据加上寄存器,可以有效改善时序,但读出的数据会落后地址两个周期)多数情况下不使能它,保持数据落后地址一个周期; Width表示数据位宽,Depth表示存储数据的个数;
FIFO Generator
-
FIFO 是为了缓存数据,因此两边的时钟通常不同,所以选择
Independent Clocks Block RAM; -
FWFT读模式:rd_en信号有效时,有效数据D0已经在数据线上准备好有效了,不会再延后一个周期(与Standard FIFO的区别)
DDS Compiler
Configuration
Configuration Options
- Phase Generator and SIN/COS LUT:一个相位生成器和用于生成正余弦波形的查找表
- Phase Generator Only:只包含相位生成器(自定义波形生成)
- SIN/COS LUT Only:仅包含正余弦查找表(用于固定频率)
System Requirements
- System Clock(MHz):系统时钟频率 \(f_{clk}\)
- Number of Channels:通道数。单个 IP 核实现多个独立的频率和相位输出
- Mode of Operation
- Standard:见 设计原理
- Rasterized:生成固定的频率点(输出频率不是连续可变的,而是在一些固定的频率值跳变),间隔由相位累加器的模数 \(M\) 决定
\[ \Delta f = \dfrac{f_{clk}}{M} \]
- Parameter Selection:
System Parameters:
将 IP 核集成到更广泛系统中所需的参数,如 IP 核的时钟配置、接口类型、以及可能涉及到的系统级优化和功能使能
- Spurious Free Dynamic Range(SFDR): 无杂散动态范围。信号最大幅度与最大杂散或噪声幅度之间的差异。SFDR 越高信号的纯净度越高
- Frequency Resolution:频率分辨率,决定了输出频率的精度
- Noise Shaping:在频率域内重新分配量化噪声,将其分配到不敏感的频率区域。
Hardware Parameters:
涉及 IP 核内部硬件实现的细节直接影响 IP 核的性能和资源消耗
- Phase Width:相位累加器的位宽,越宽频率分辨率越高
- Output Width:输出波形位宽,决定了波形最大幅度和幅度分辨率
Implementation
Phase Increment Programmability
- Fixed:相位增量固定,频率不可更改
- Programmable:相位增量可以在运行时修改,允许动态修改频率
- Streaming:相位增量可以实时更新(连续变化频率)
Phase Offset Programmability
- None:没有初始相位偏移
- Fixed:相位偏移固定,不可更改
- Programmable:可以在在运行时修改
Output
- Output Selection:正弦、余弦或两者同时输出(
sin在高位,cos在低位) - Polarity:将相位增加 \(\pi\)
Implementation Options
- Has Phase Out:输出相位信息
- Memory Type:查找表存储方式
- Optimization Goal:优化速度或面积;DSP48 Use:DSP48 资源使用程度
Fast Fourier Transform
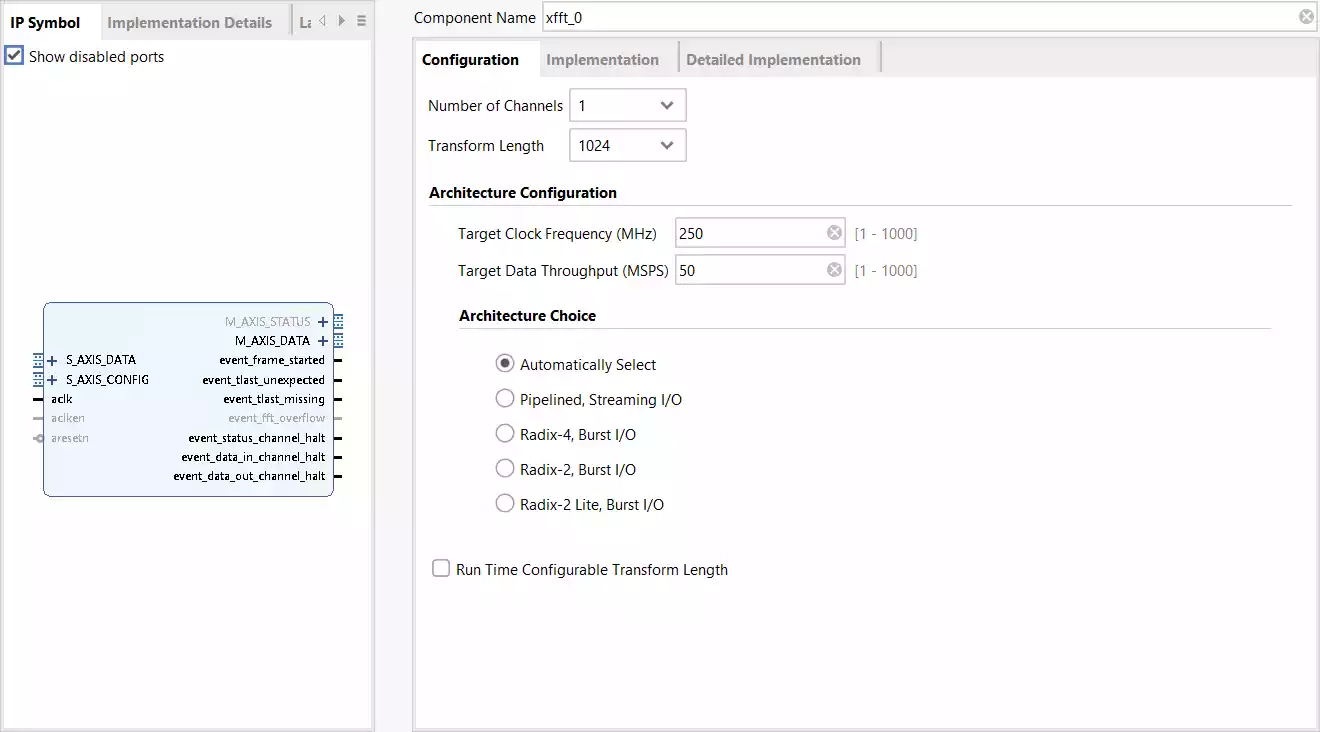
Configuration
- Number of Channels:多通道,实现多帧数据同时进行 FFT 运算
- Transform Length:FFT 长度
- Architecture Configuration
-
Target Clock Frequency(MHz)
- Target Data Throughput(MSPS)
-
Architecture Choice
- Automatically Select:自动选择
- Piplined, Streaming I/O:并行流水线结构(处理时间最短,资源消耗最大)
- Radix-4, Burst I/O:基 4
- Radix-2, Burst I/O:基 2
- Radix-2 Lite, Burst I/O:
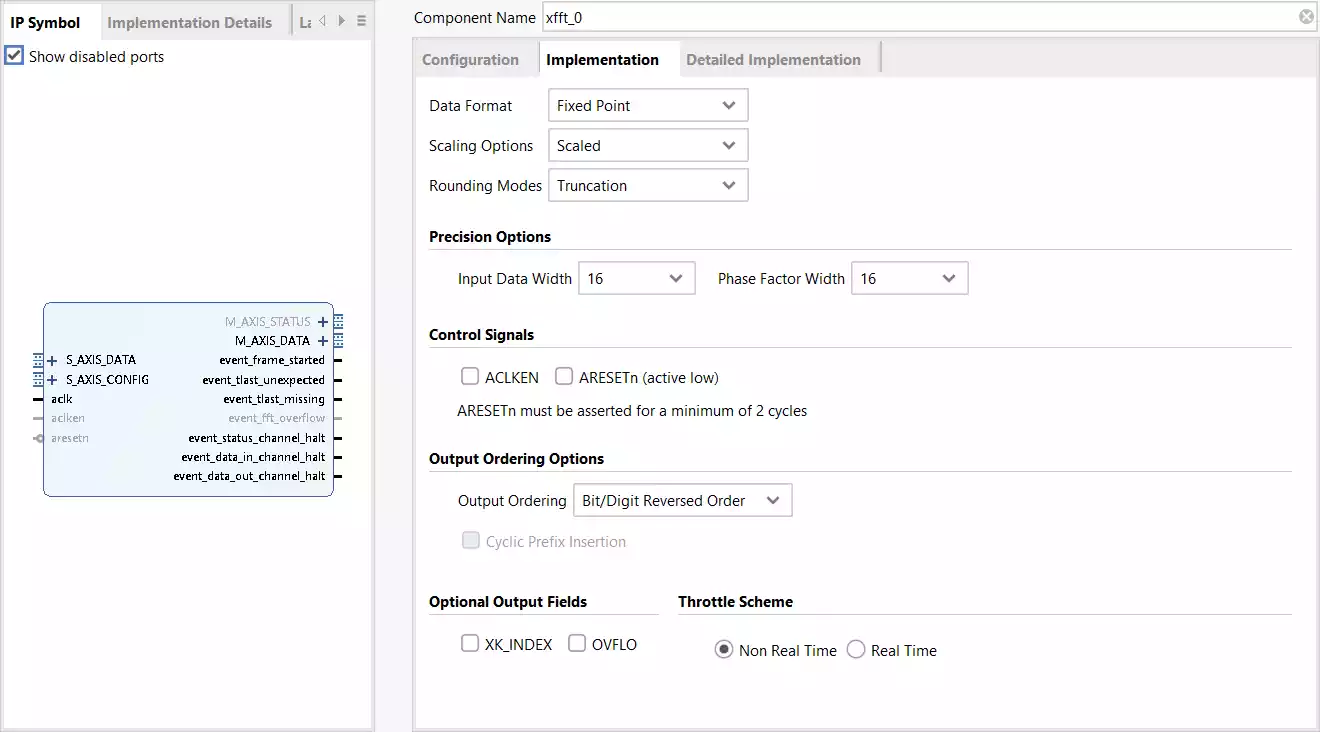
Implementation
-
Data Format:Fixed Point(定位全精度);Floating Point(定位缩减位宽)
-
Scaling Options:
-
Block Floating Point:FFT 内部采用浮点,并根据每一级的数据自动缩放(输入输出位宽一致)
- Scaled:
m_axis_data_tuser中有 \(5bit\) 表示每一级的缩放情况 -
Unscaled:不用担心溢出
-
Rounding Modes:Convergent Rounding;Truncation
- Scaled:
-
Precision Options
-
Input Data Width:
- Phase Factor Width:
-
Control Signals
-
ACLKEN
- ARESETn(active low)
-
Output Ordering Options
-
Output Ordering:Bit/Digit Reversed Order;Natural Order
- Cyclic Prefix Insertion
-
Optional Output Fields:XK_INDEX;OVFLO
- Throttle Scheme:Non Real Time;Real Time
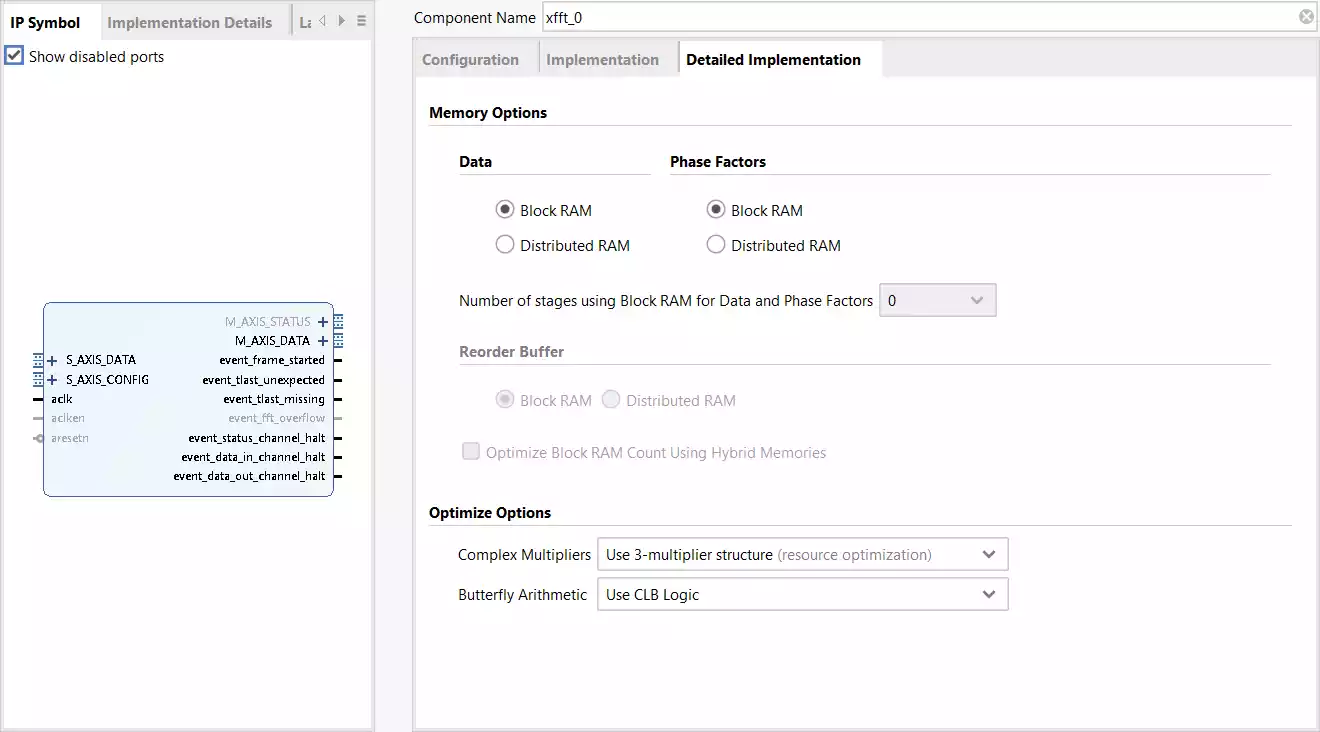
Detailed Implementation
- Memory Options
- Data:Block RAM;Distributed RAM
- Phase Factors:Block RAM;Distributed RAM
- Number of stages using Block RAM for Data and Phase Factors
- Reorder Buffer:Block RAM;Distributed RAM;Optimize Block RAM Count Using Hybrid Memories
- Optimize Options
- Complex Multipliers
- Butterfly Arithmetic
FIR
Hardware Oversampling Specification
\(Clock\space Frequency\space /\space Input\space Sampling\space Frequency = usmp\_rate\)
ILA(Integrated Logic Analyzer)
常用的 在线调试 方法:
- ILA IP Catalog
- VIO IP Catalog
(* MARK_DEBUG="true" *),[SYNTHESIS] 综合后打开 [Open Synthesized Design],右上角选择 [Debug] 模式,被标记的信号会有 🕷️ 标识。
General Options
Native:常规普通接口模式AXI:AXI 接口模式,用于调试 AXI 接口信号Number of Probes:探针数量Sample Data Depth:采样数据深度,数值越大,采样的数据越多,看到的波形数据越多(最终占用的资源越多)
Probe_Ports
Probe Width:根据代码中的定义设置位宽Probe Trigger or Data:设置为DATA AND TRIGGER
例如:
ila your_instance_name (
.clk(clk), // input wire clk
.probe0(probe0), // input wire [31:0] probe0
.probe1(probe1) // input wire [3:0] probe1
);
调试界面
bit 文件烧写后,会进入下图所示的 ILA 调试界面
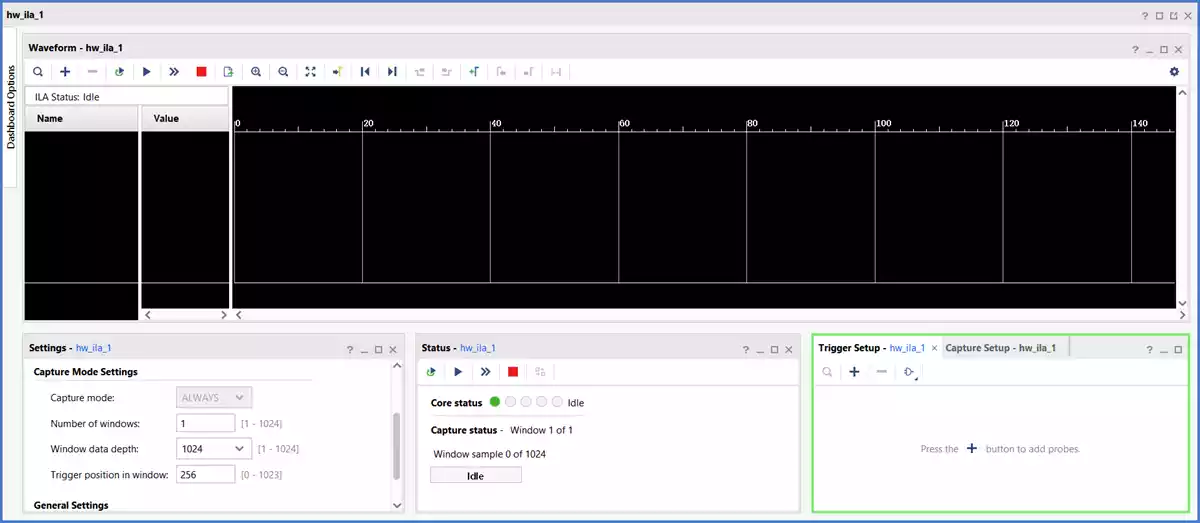
Waveform 窗口
通过 [+/-] 选择需要观察的波形(波形能否显示与 Probe_Ports 的 Probe Trigger or Data 参数设置有关)
Status 窗口
四个按钮分别为:循环采样、条件触发采样、无条件执行 ILA 采样、停止采样按钮
Core status 表示 ILA 的运行状态
参考资料
- Zynq 7000 SoC Technical Reference Manual UG585 (v1.14) June 30, 2023